Natale per i ma(r)kers: Ornamenti personalizzati per l'albero di Natale fatti da un robot
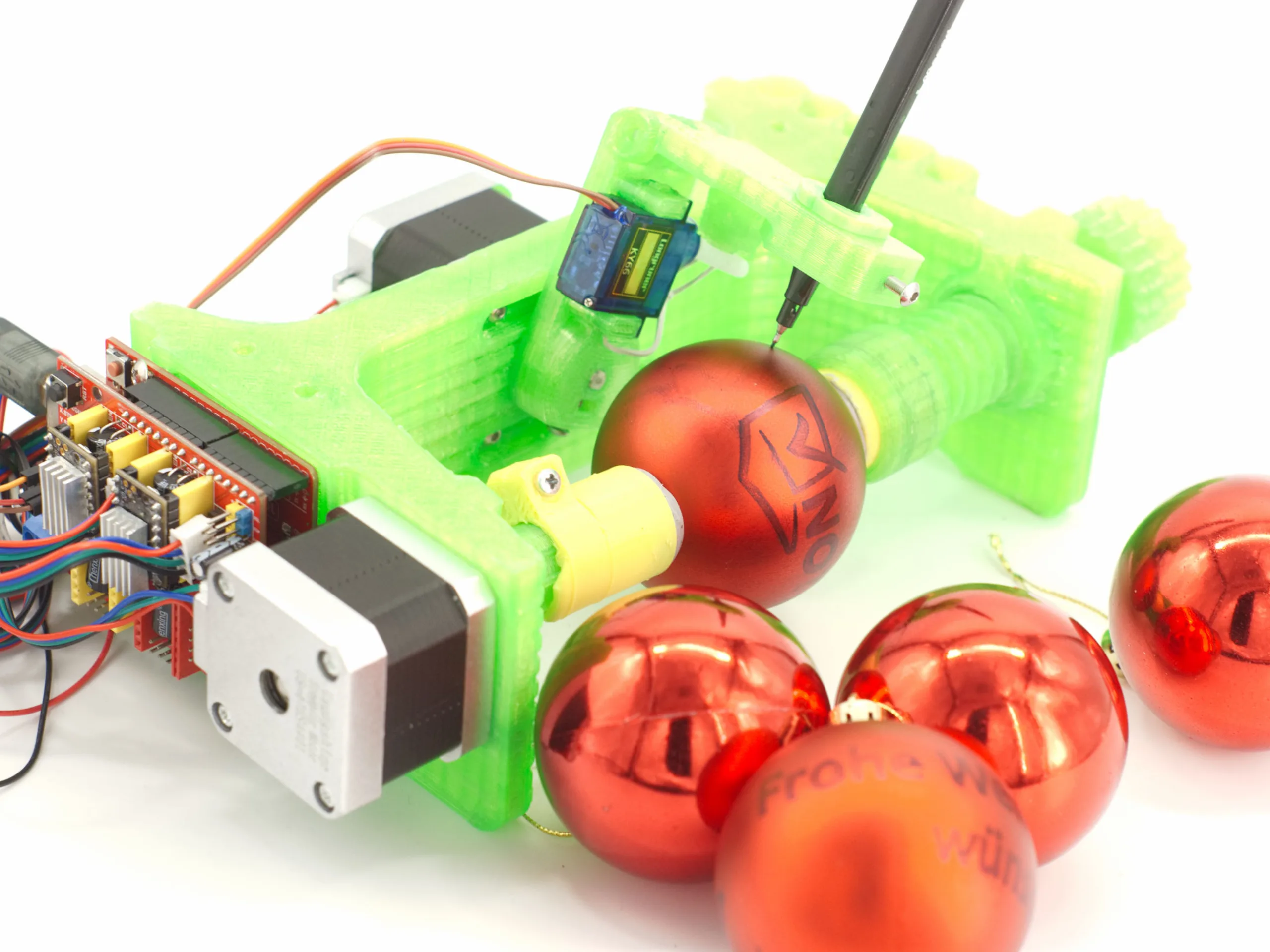
Uno Spherebot o Eggbot disegna modelli da un PC su qualsiasi cosa sia rotonda. Tramite thingiverse.com e instructables.com si possono trovare diversi tutorial e modelli per i piccoli robot, che potrebbero anche essere chiamati sphere plotter. La lista dei materiali è abbastanza simile per la maggior parte degli Spherebots. Sono necessari due motori Nema 17, un piccolo servo, un Arduino Uno, uno scudo CNC e driver per motori passo-passo. Inoltre, è necessario un alimentatore, viti, cavi, palline e marcatori corrispondenti. Su Amazon, l'elenco completo dei materiali ha un prezzo di circa 50 dollari. Se avete una stampante 3D, probabilmente potete prendere in prestito i suoi costosi motori Nema 17 e i driver dei motori passo-passo per il progetto

Istruzioni e manuali di costruzione
Ci sono molte istruzioni più o meno semplici per un Eggbot su varie pagine DIY comeinstructables e thingiverse. La maggior parte di loro può essere fatta con una stampante 3D. Almeno 20 di questi Eggbot possono essere trovati con vari nomi tramite thingiverse.com. Ho messo insieme una piccola selezione in una raccolta qui. Gli hobbisti intraprendenti possono probabilmente fare a meno di una stampante 3D per alcuni progetti e lavorare solo con compensato, viti, cuscinetti a sfera e alcune staffe. Ho scelto il progetto di Herbert Schützeneder, che penso sia molto intelligente. La maggior parte delle parti del suo Eggbot sono stampate in 3D. Fondamentalmente, la lista della spesa è molto simile per la maggior parte degli Eggbot. Questo anche perché l'originale di Evil Mad Scientist è stato disponibile come progetto open-source per diversi anni. Quindi, per la maggior parte, sono necessari solo aggiustamenti per adattare le repliche ai diversi metodi di fabbricazione.
BOM per l'Eggduino di Herbert_b1:
2 × Motore passo-passo Nema 17
1 × CNC-Kit con Arduino Uno clone
1 × Servomotore SG90 o KY66
1 × viti M3
1 × cuscinetto a sfera 608
1 × condensatore da 10 µF a 100 µF
1 × convertitore AC/DC che fornisce una tensione tra 12 V e 24 V
alcuni pennarelli (permanenti)

Nel mio caso, i motori passo-passo e i driver del motore passo-passo TMC2100 provengono da una stampante 3D che non è più in uso. Come alimentazione uso un vecchio mattone da laptop con 19 V. La tensione più alta è più di un vantaggio per il CNC-Shield poiché il clone Arduino Uno è alimentato da USB. Con la tensione più alta, i motori possono essere guidati con meno corrente. Questo si traduce in una minore dissipazione di calore ai motori e all'elettronica. Inoltre non ho dovuto comprare un cuscinetto a sfera, poiché i cuscinetti a sfera 608 sono gli stessi di quelli degli skateboard e dei pattini in linea.
Software - Download, installazione e modifica
L'Arduino Uno (clone) è programmabile usando l'IDE di Arduino. L'applicazione può essere scaricata da www.arduino.cc/en/software o acquisita da varie fonti. Su Windows, l'applicazione è anche disponibile per l'installazione tramite il Microsoft Store
Per creare le immagini e i modelli per la palla dell'albero di Natale, l'applicazione open source Inkscape https://inkscape.org/release/inkscape-1.1.1/ con un'estensione EggBot. L'ultima versione 1.1 può essere scaricata tramite la pagina di rilascio.
Un firmware pronto all'uso per Arduino Uno (clone) è disponibile su Github nel repository Eggbot di Plex3r. Qui è possibile avviare il download di come file zip cliccando sull'elemento verde del codice. Le istruzioni di Plex3r per modificare l'estensione Eggbot purtroppo non funzionano con le nuove versioni del software.
L'ultima versione di EggBot 2.81 viene scaricata dal repository di Evil Mad Scientist e modificata al suo posto. Avrai bisogno dei due archivi eggbot-inkv1r2.zip e EggBotExamples_v281.zip dalla cartella di rilascio.
Programmazione di Arduino Uno
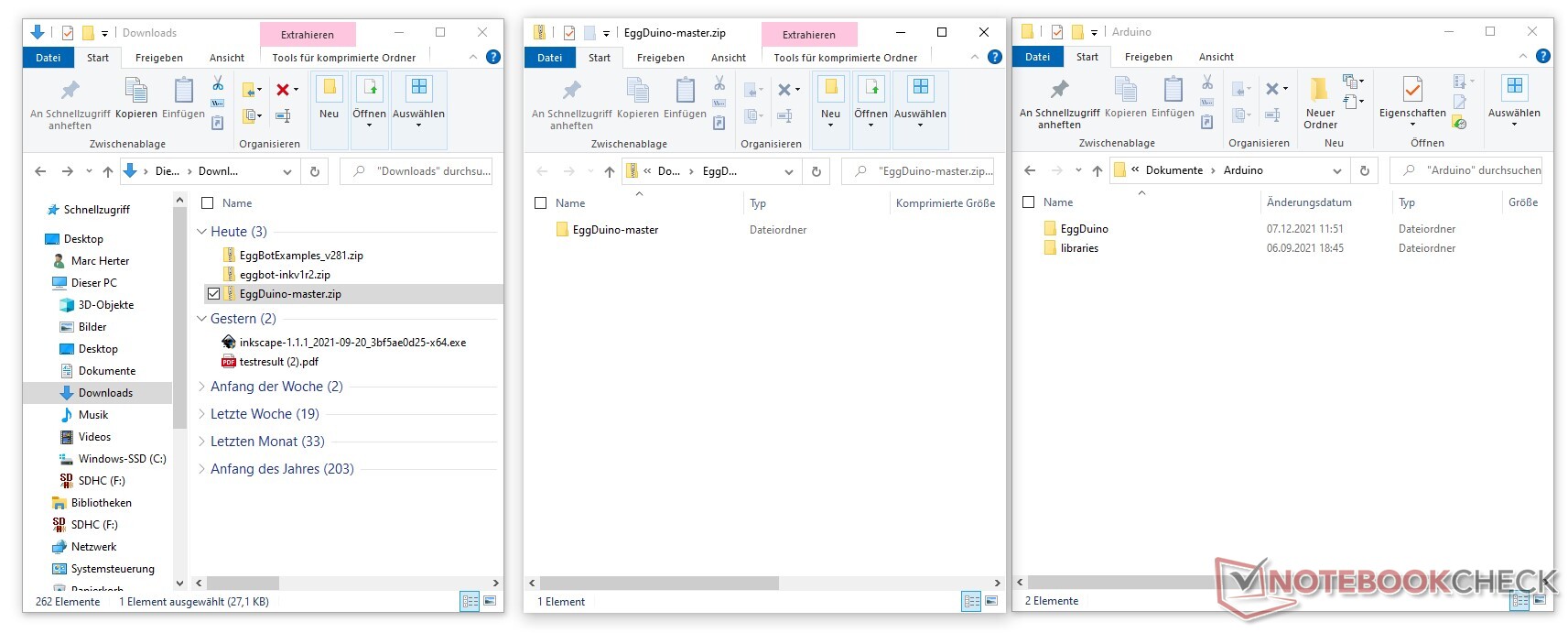
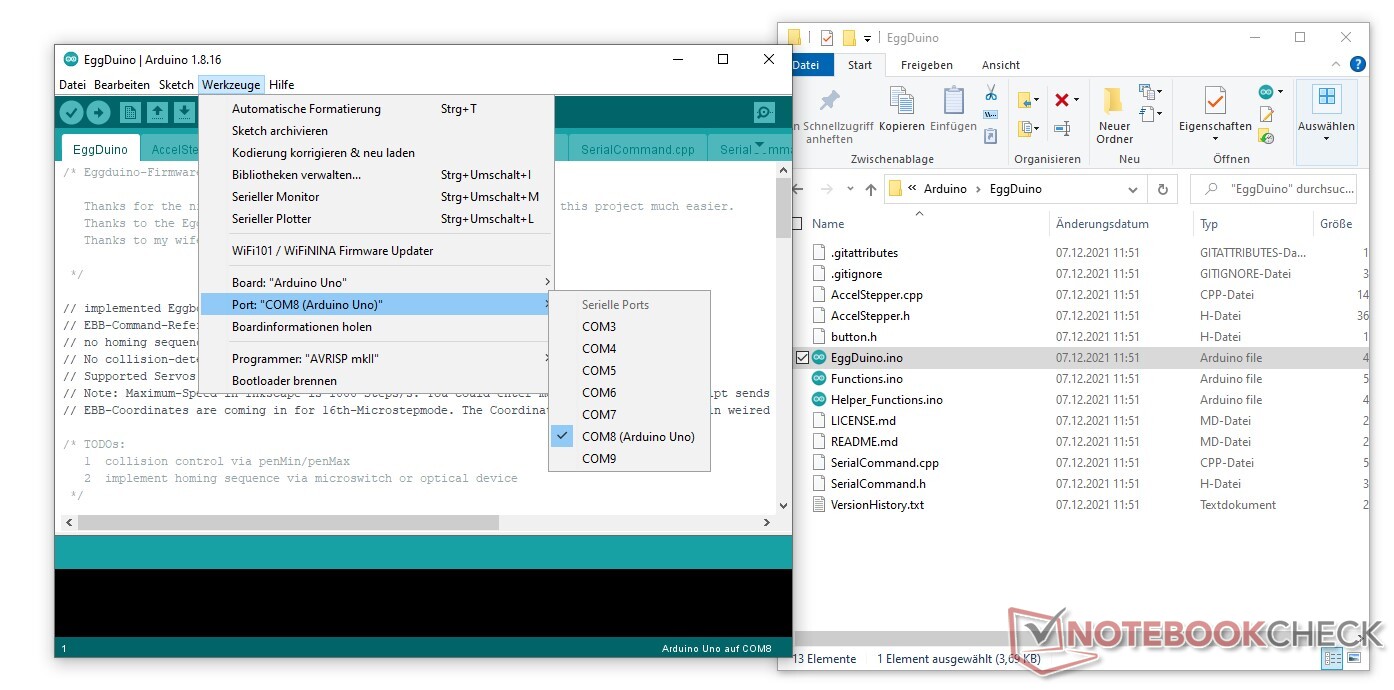
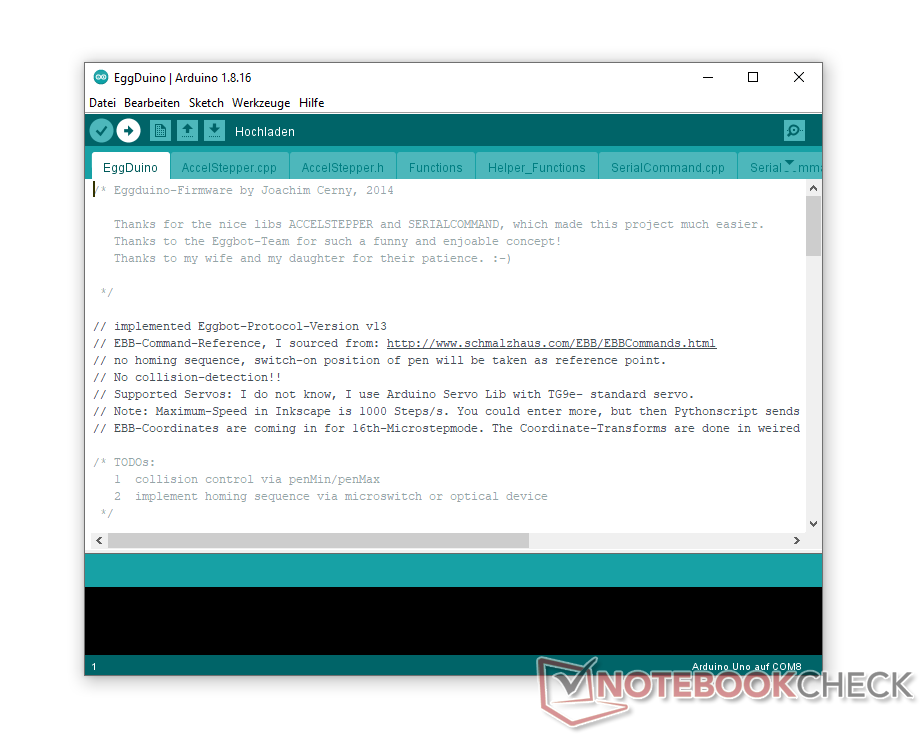
Dopo l'installazione dell'IDE di Arduino, aprite il file EggDuino-master.zip e scompattatelo nella cartella utente Documents/Arduino. Affinché l'IDE possa lavorare con il contenuto della cartella, questa deve essere rinominata in EggDuino. Fai doppio clic su EggDuino.ino nella cartella rinominata EggDuino per aprire il file. Ora puoi collegare l'Arduino Uno (clone) al computer tramite cavo USB. Seleziona la scheda con Tools>Port. Poi si carica il programma così com'è. In seguito, tutto è collegato in modo che il pinout programmato corrisponda.
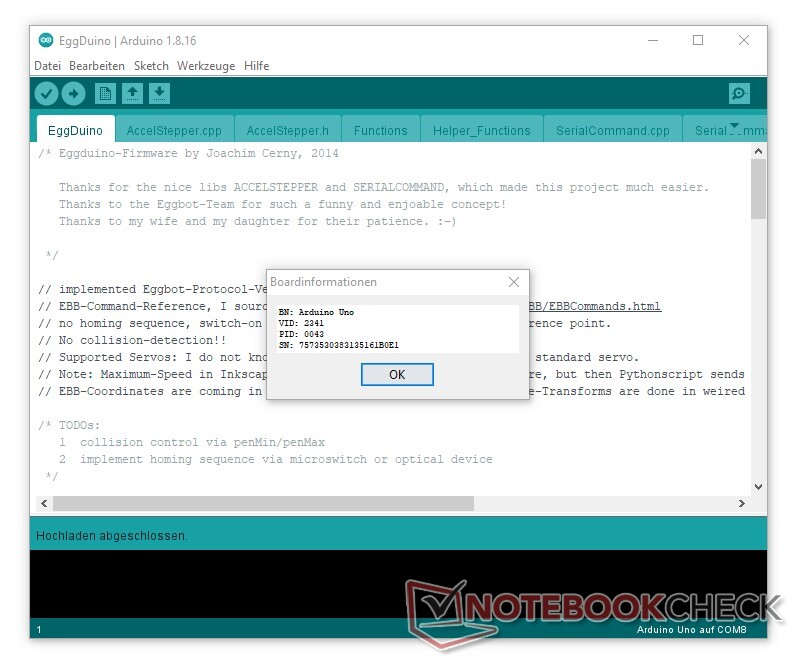
L'ID hardware della scheda di sviluppo è necessario per adattare l'estensione EggBot per Inkscape all'EggDuino nel passo successivo. Questo ID può essere recuperato con l'IDE di Arduino tramite Tools>Get Board Information. VID e PID possono essere copiati con CTRL+C e poi incollati in un file di testo.
Installazione e modifica dell'estensione EggBot
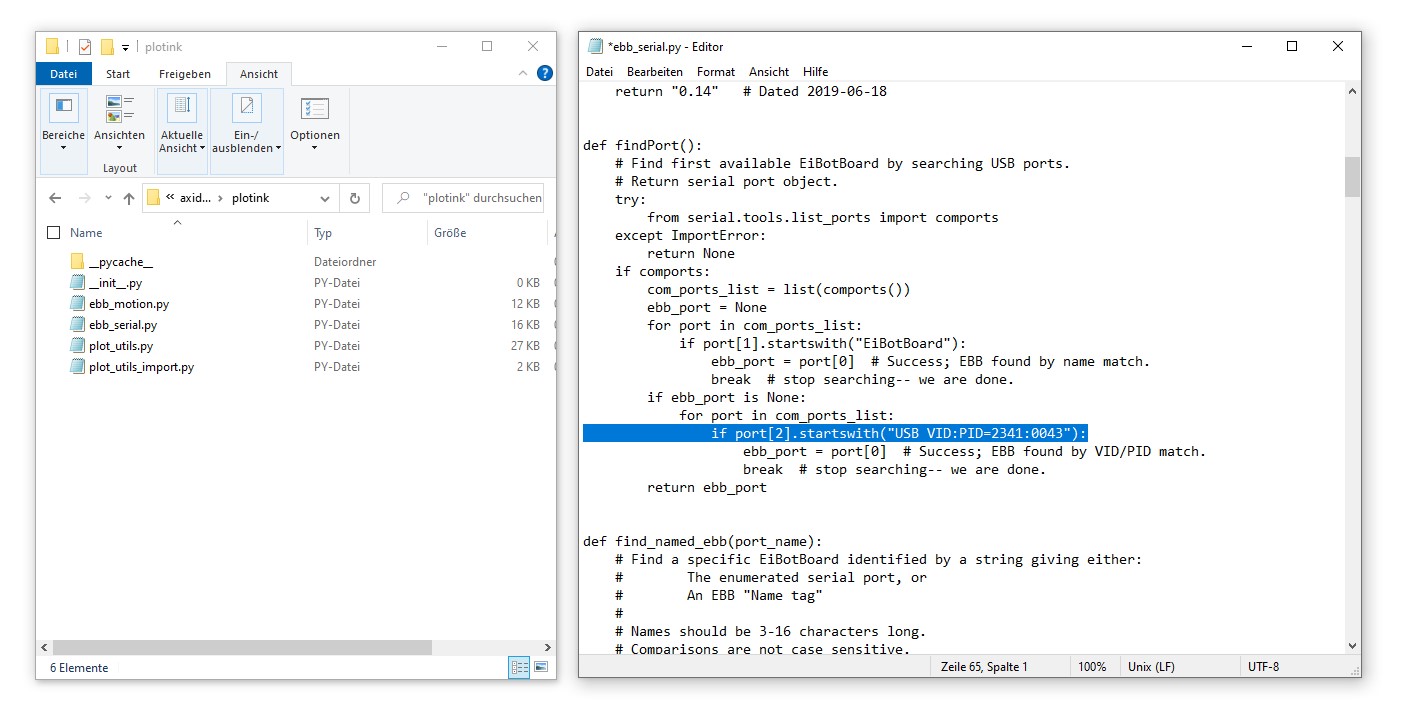
Il file zip eggbot-inkv1r2.zip contiene la completa estensione EggBot per Inkscape. Tuttavia, questa estensione deve essere adattata all'EggDuino prima di poter essere integrata in Inkscape. Per prima cosa decomprimi l'archivio in un posto arbitrario. Nella cartella scompattata, cerca il file ebb_serial.py. Questo si trova sotto eggbot-inkv1r2axidraw_depsplotink. Aperto con l'editor, lo script Python può essere modificato. Nella linea 65 [ if port[2].startswith("USB VID:PID=04D8:FD92"): ] l'ID hardware dell'EggBot originale viene cercato dallo script. Questo deve essere cambiato nell'Eggduino con i valori precedentemente determinati per VID e PID.
Quindi nel mio caso la nuova linea è: [ if port[2].startswith("USB VID:PID=2341:0043"): ]
Poiché non tutti gli Arduino Uno e i loro cloni hanno lo stesso hardware-ID semplicemente copiando la mia modifica potrebbe non avere successo.
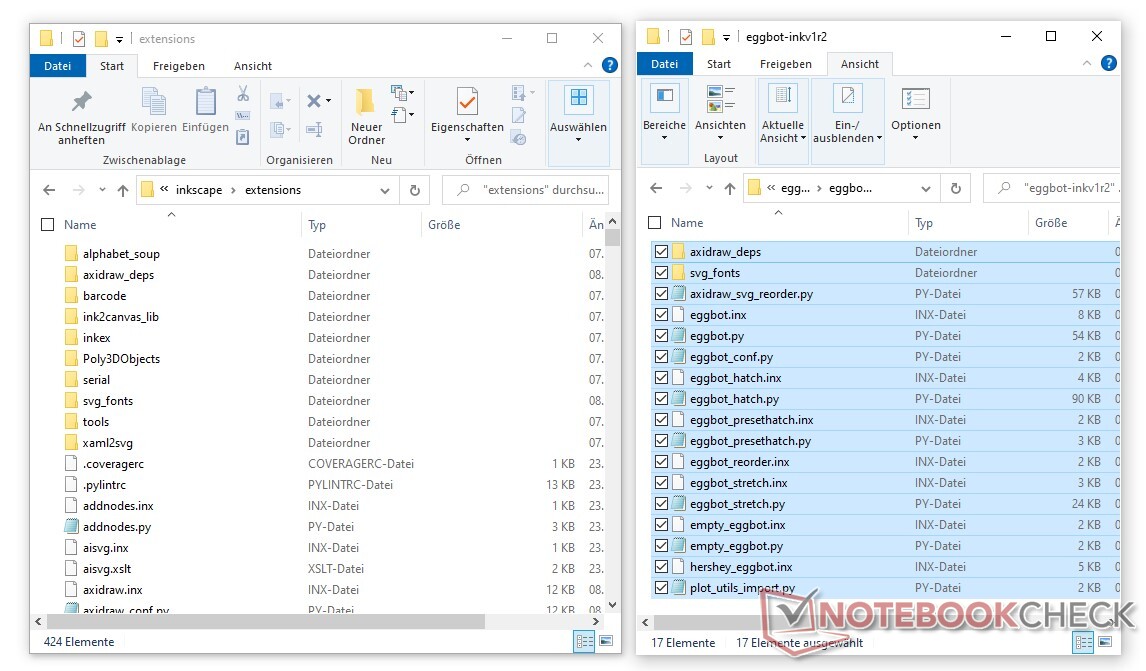
Dopo aver salvato la modifica, il contenuto completo della cartella eggbot-inkv1r2 verrà trasferito nella cartella extensions di Inkscape 1.1. Se la cartella di installazione predefinita non è stata cambiata durante l'installazione, si trova a
C:Program FilesInkscapeshareinkscapeextensions
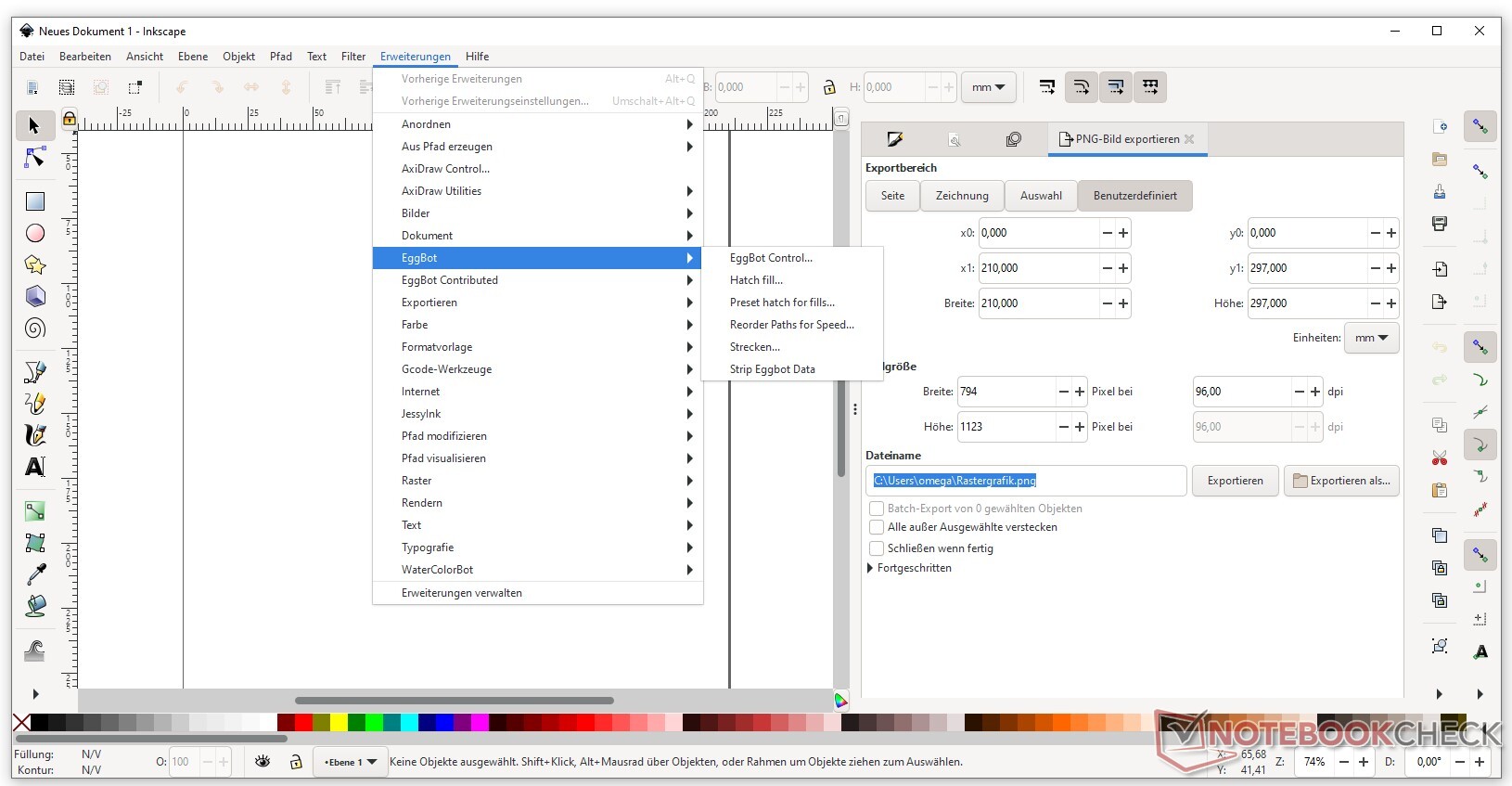
Se ora apri Inkscape, dovresti essere in grado di trovare Eggbot sotto Extensions.
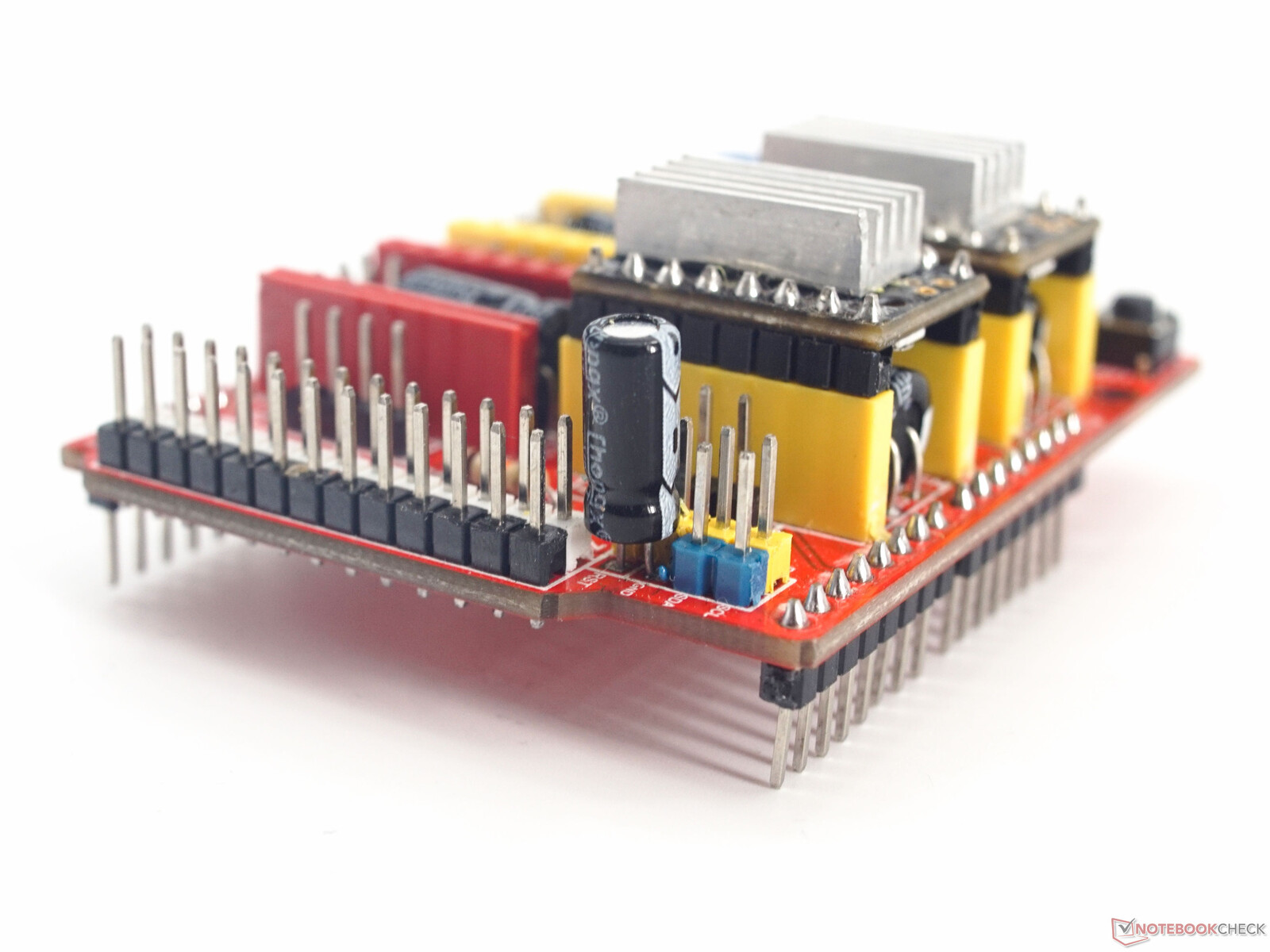
Montaggio
L'assemblaggio generale dei componenti dovrebbe essere semplice, ma occuparsi del cablaggio può essere un po' complicato. Poiché Arduino Uno è molto indulgente, gli errori non sono, in generale, un grosso problema
driver per motori passo-passo
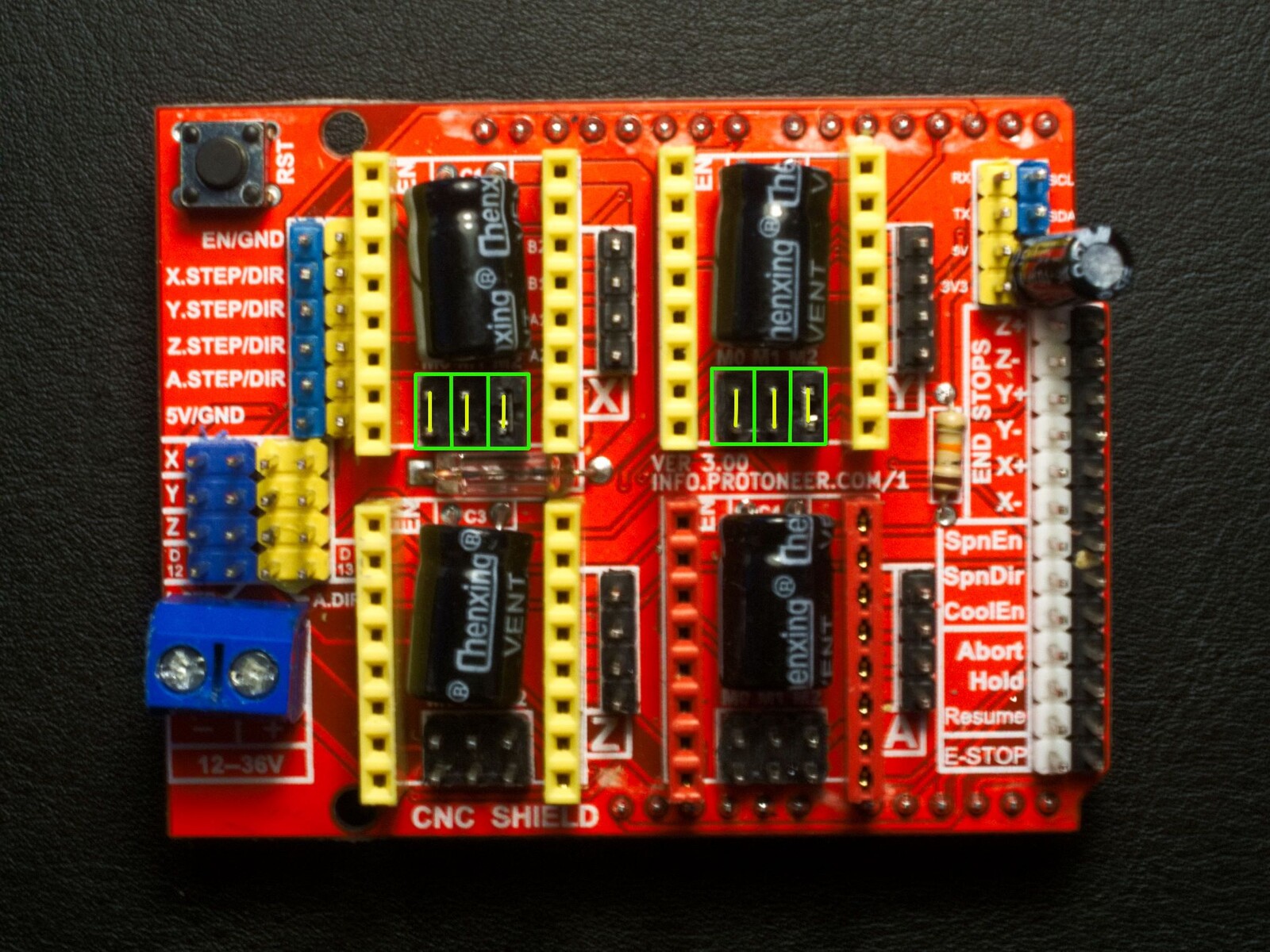
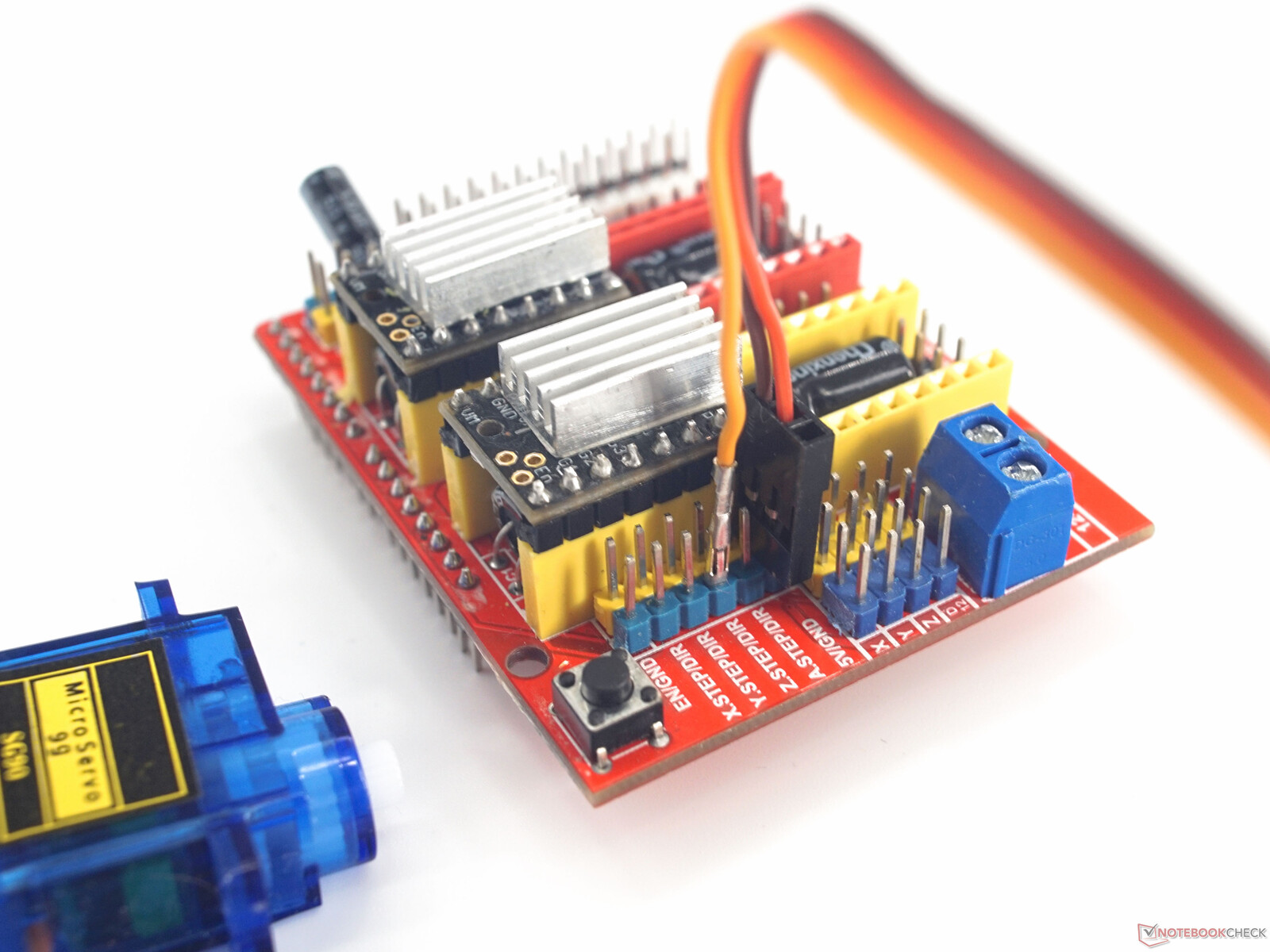
In primo luogo, i ponticelli devono essere impostati per regolare il microstep. A seconda del driver del motore passo-passo, i ponticelli devono essere impostati in modo diverso. L'idea è di ottenere un microstep di 1/16. Con i driver A4988 inclusi nel kit CNC dal link sopra, tutti e tre i jumper devono essere impostati. Nell'immagine a destra, i posti corrispondenti sono segnati in verde e le connessioni in giallo. M0, M1 e M2 devono essere collegati. Per l'Eggbot sono necessari solo i motori X e Y
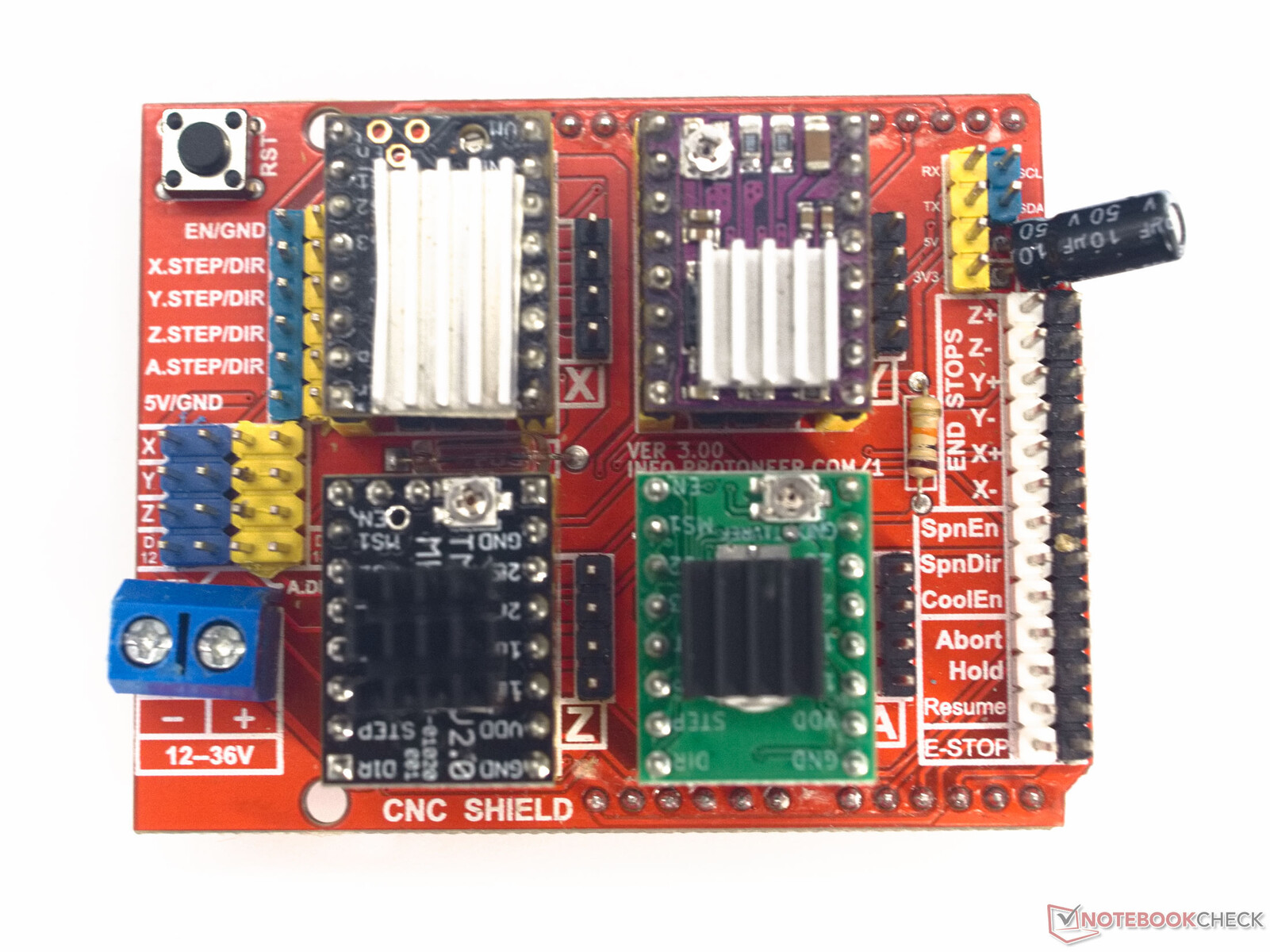
Nel passo successivo, i dissipatori sono incollati sui driver del motore passo-passo e i driver sono inseriti negli slot per X e Y. Qui bisogna fare attenzione all'allineamento. Normalmente, il pin EN è segnato su tutti i driver per motori passo-passo compatibili con Pololu. Questo deve essere collegato alla presa EN sullo schermo del CNC, solo allora l'allineamento è corretto
Si prega di fare riferimento alla scheda tecnica del rispettivo produttore per informazioni sulle tensioni e le impostazioni per il microstep e la corrente.
Disattivare il reset automatico di Arduino Uno
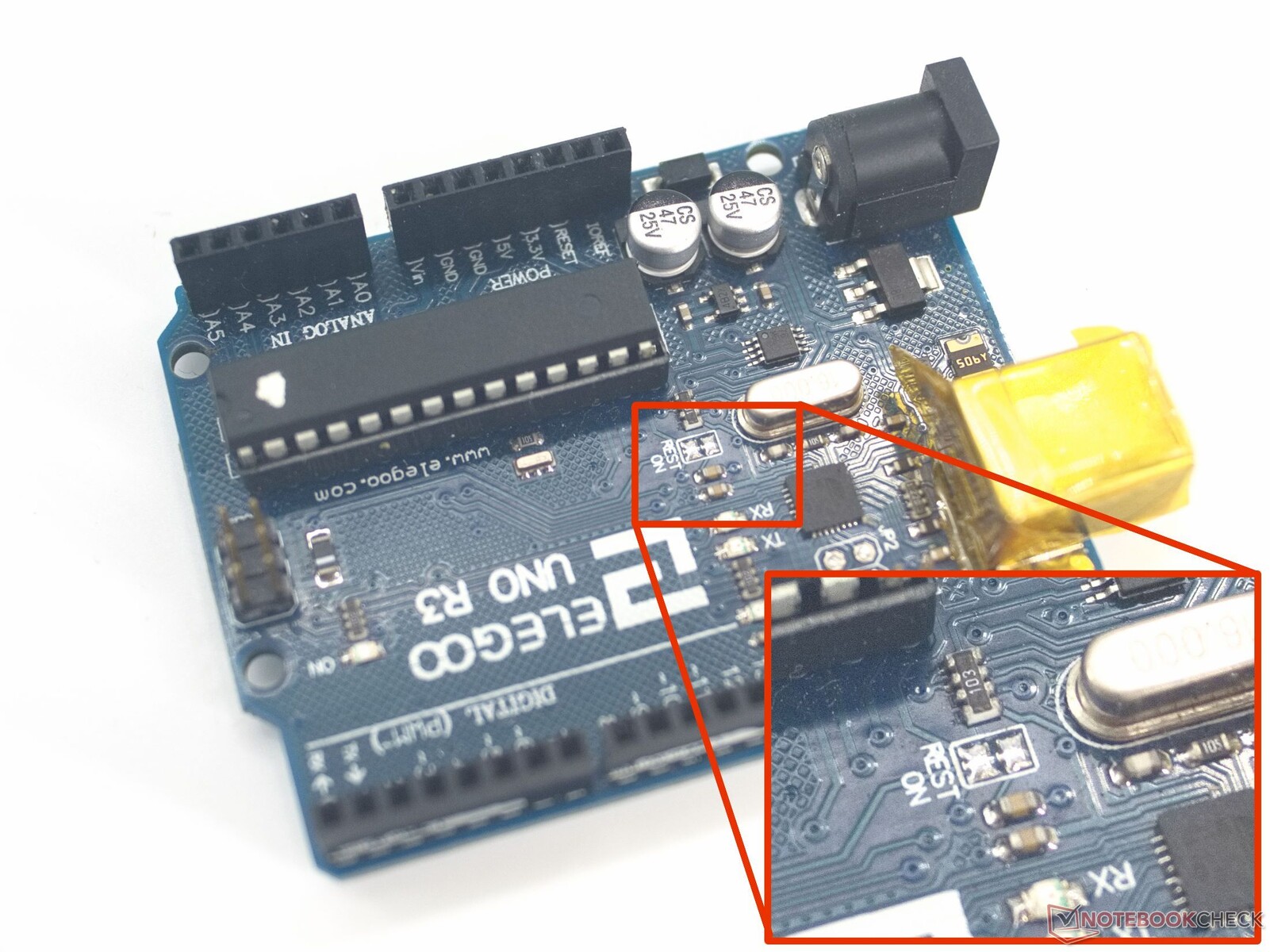
Per una corretta connessione con Inkscape, è necessario disabilitare l'auto-reset su Arduino. La prima possibilità è quella di scollegare un contatto su Arduino UNO. Sulle schede c'è sempre un contatto jumper, che è segnato come REST-EN o REST-ON. Dopo che la scheda è stata programmata, questo contatto può essere scollegato con un coltello. Se avete bisogno di nuovo dell'auto-reset, potete impostare un ponte di saldatura.
È anche possibile disabilitare l'auto-reset con un condensatore tra il pin di reset e il pin GND sullo schermo del CNC. Il condensatore deve avere una capacità di almeno 10 µF. Un condensatore elettrolitico è saldato con il suo pin negativo sul pin GND dello schermo CNC. I condensatori ceramici e a foglio non hanno polarità. La rigidità dielettrica del condensatore deve essere almeno 1,5 volte la tensione dell'alimentazione scelta.
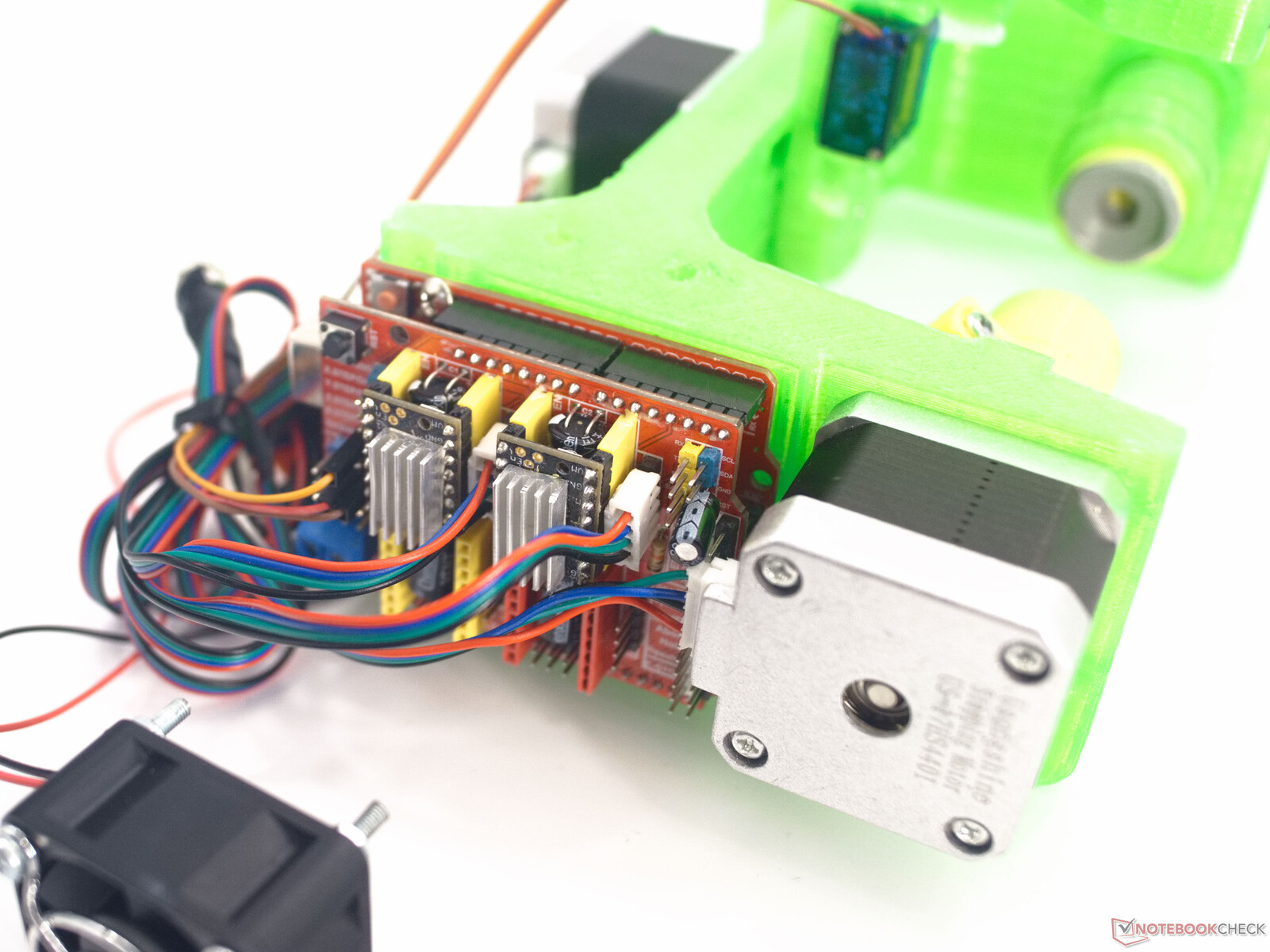
Cablaggio
Tutti gli Eggbot usano due motori passo-passo e un servo. Il motore passo-passo che fa girare la palla o l'uovo è collegato ai contatti dell'X-driver, il motore passo-passo per il braccio della penna è collegato ai contatti accanto all'Y-driver. Il modo in cui i due connettori sono collegati cambia solo il senso di rotazione. Questo può essere invertito in seguito in Inkscape.
I tre fili del servomotore sono collegati ai pin 5V, GND e Z.STEP del CNC-Shield. Il cavo nero a GND, quello rosso a 5V e quello giallo a Z.STEP.
Impostazione e tracciatura del software
Una volta che tutto è assemblato, l'Arduino può essere collegato al PC e il CNC-Shield all'alimentazione. In Inkscape si chiama ora il pannello di controllo dell'Eggbot, e qui si devono ancora impostare le impostazioni per il servomotore e il senso di rotazione dei motori passo-passo. Per trovare le impostazioni giuste devi fare alcuni esperimenti.
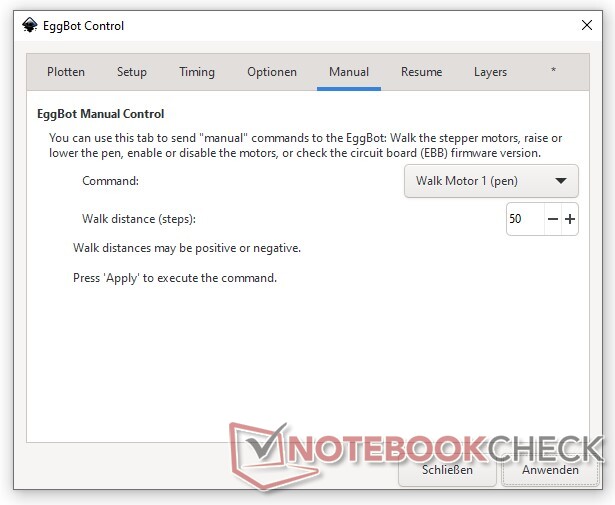
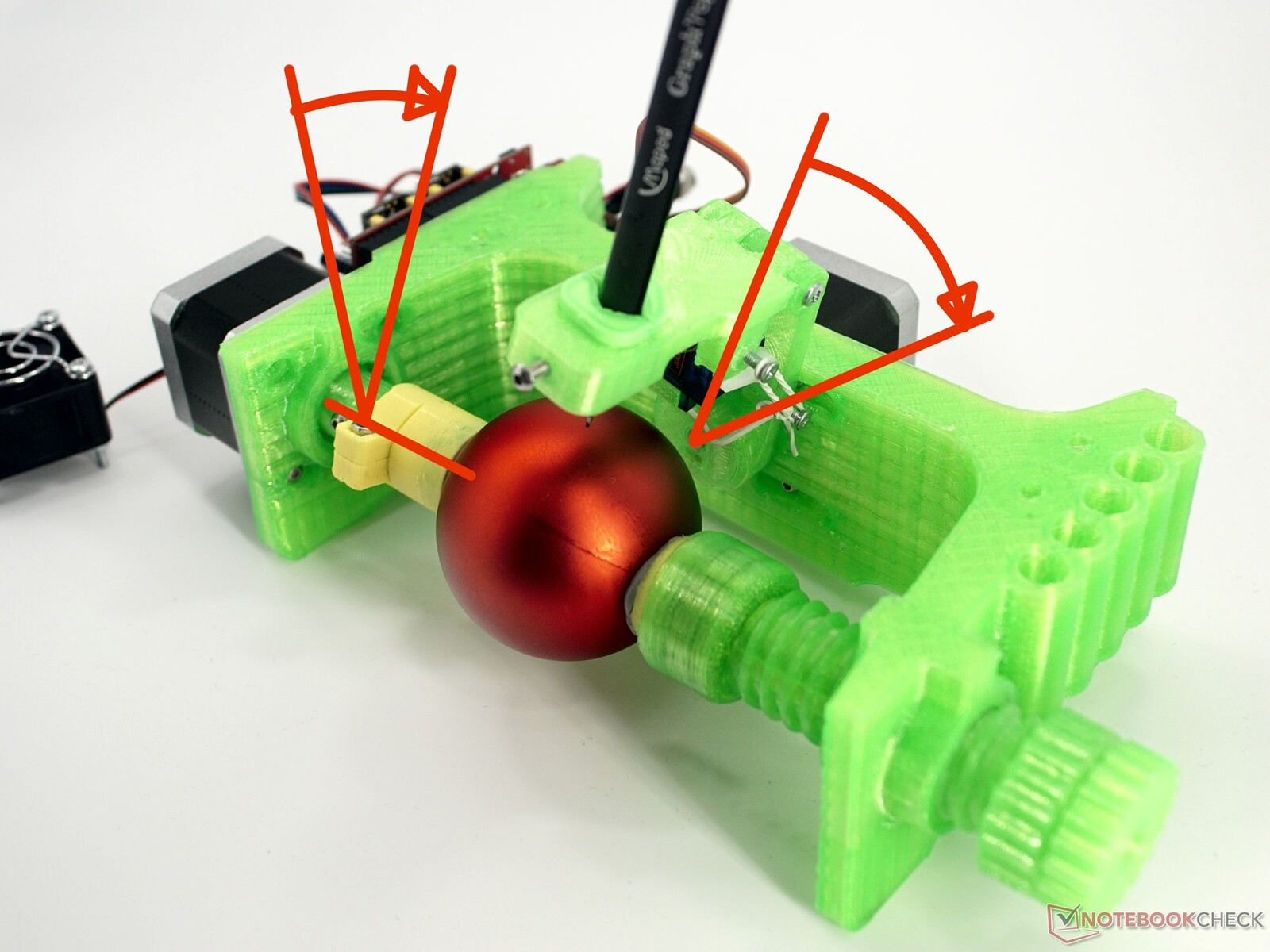
Nella scheda Manual, puoi prima determinare la direzione di rotazione del braccio della penna. Seleziona Walk Motor 1 (Pen) dal menu a discesa e inserisci un valore positivo sotto e clicca su Apply. La penna dovrebbe ora muoversi verso la punta del bauble con il gancio dell'ornamento. Quindi, a seconda del modo in cui vuoi bloccare le palline, questo è a sinistra o a destra. Ripeti lo stesso processo con la voce di menu selezionata, Walk Motor 2 (Egg). La palla dovrebbe ruotare in senso orario quando viene vista dal punto di sospensione.
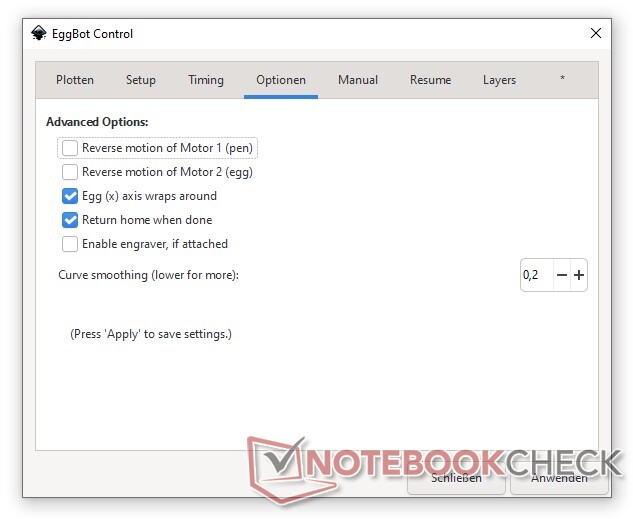
Se i sensi di rotazione non corrispondono, la casella di controllo Reverse motion of Motor deve essere impostata o cancellata per il motore corrispondente nella scheda Options.
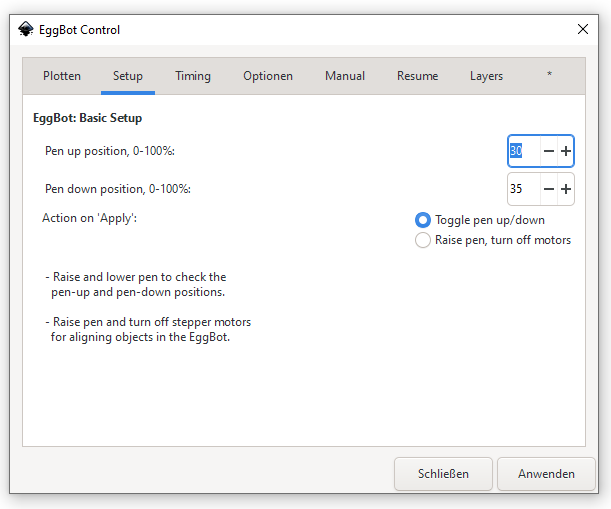
Anche i valori del servomotore devono essere regolati. Qui dipende se avete un servomotore con direzione di rotazione positiva o negativa. Nel mio caso, il valore da impostare in Eggbot Control Setup per la posizione pen-up è più piccolo di quello della posizione pen-down. Potresti dover provare un paio di valori per trovare quelli giusti.
Tracciare
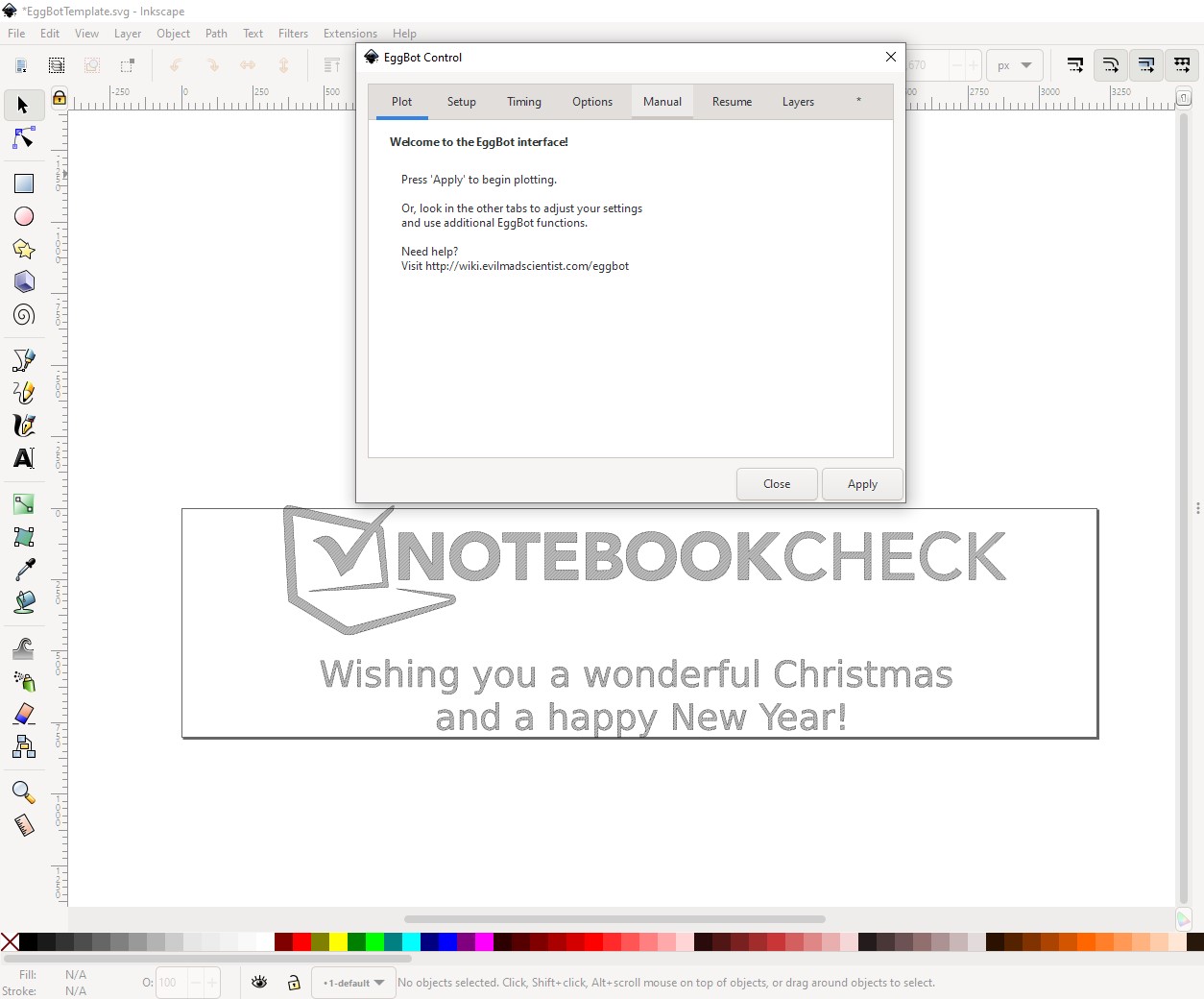
Una volta che tutto è assemblato, installato e impostato, si può finalmente iniziare a disegnare. Nell'archivio EggBotExamples_v281.zip ci sono alcuni modelli per diverse occasioni. Questi possono essere caricati, modificati e disegnati come desideri. Il file EggBotTemplate.svg serve come modello per i tuoi disegni. Quando si aprono alcuni modelli, Inkscape probabilmente chiederà se qualcosa deve essere cambiato nei file, dato che sono stati creati con una vecchia versione di Inkscape. La nuova estensione Eggbot è stata adattata a Inkscape 1.1 in modo che tu debba selezionare qui "This file is intended for on-screen display[...]", altrimenti l'output su Eggbot sarà distorto.
Con il disegno finito, non hai bisogno di fare nient'altro che tracciarlo tramite il Centro di Controllo Eggbot. Basta cliccare su "Apply" nella scheda Plot.

Fonti

