I ricercatori del Politecnico di Zurigo svelano il robot ANYmal AI a quattro zampe, in grado di completare percorsi a ostacoli come i K-9 in un campo di addestramento

ETH Züricchi ricercatori di robotica hanno presentato un robot ANYmal a quattro zampe in grado di navigare su terreni complessi, utilizzando moduli AI altamente addestrati per il movimento, la visione e la localizzazione. Questi moduli all'avanguardia ampliano la gamma di ostacoli e terreni che i robot quadrupedi possono navigare in modo indipendente.
In precedenza, è stato dimostrato che i 'cani' robotici sono in grado di navigare in corridoi puliti e in edifici, nonché in colline e terreni all'aperto, ma si sono affidati all'uomo per guidare l'addestramento, a lunghi tempi di calcolo per determinare il modo migliore di muoversi o a una conoscenza preliminare dell'ambiente. La ricca ricerca dell'ETH Züricerca supera queste limitazioni e ANYmal è in grado di riprendersi dinamicamente dalle cadute e di navigare su superfici complesse, nonostante sia stato completamente addestrato all'interno di una simulazione Nvidia Isaac Gym simulazione senza supervisione.
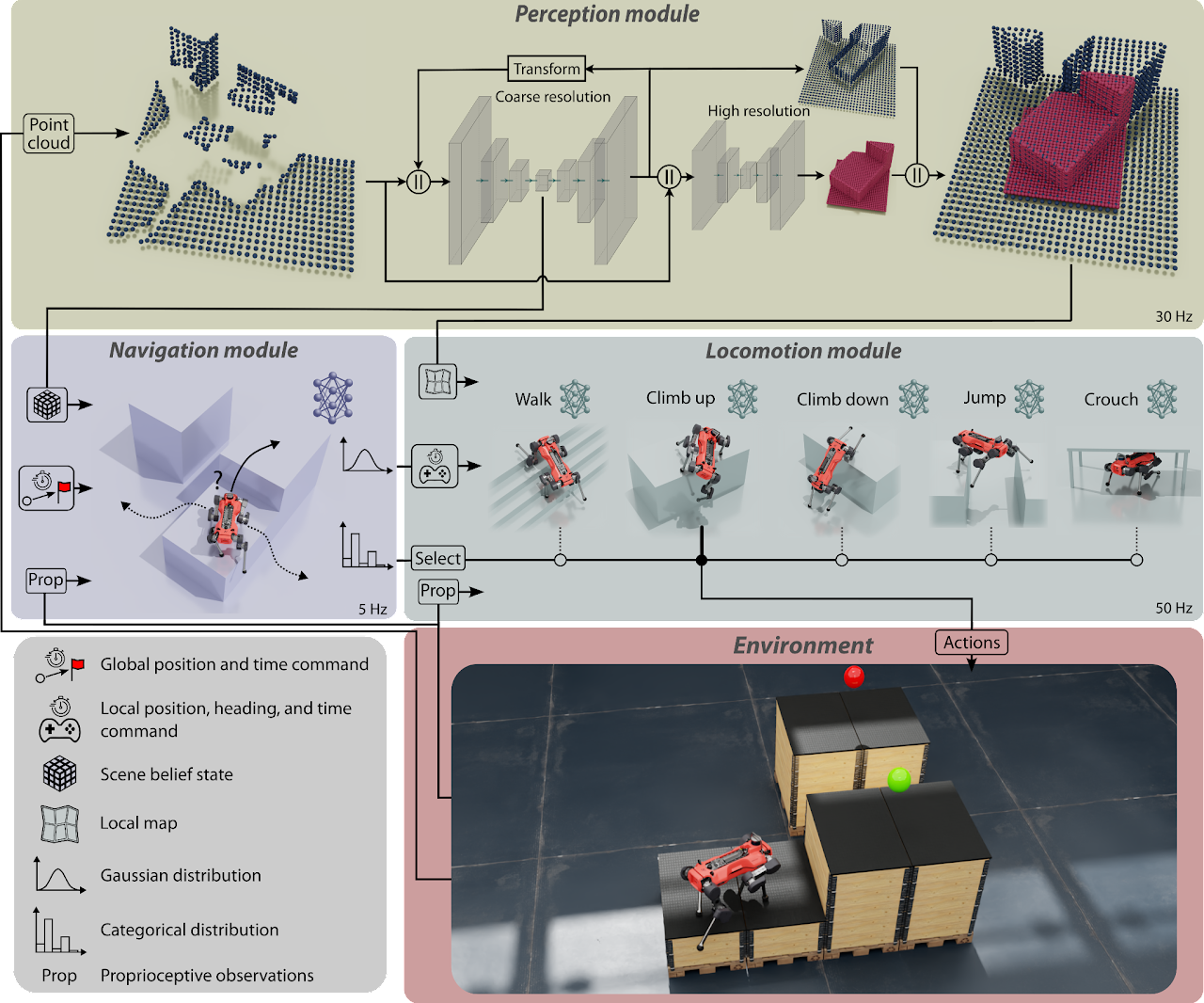
Tre moduli che compongono il cervello AI
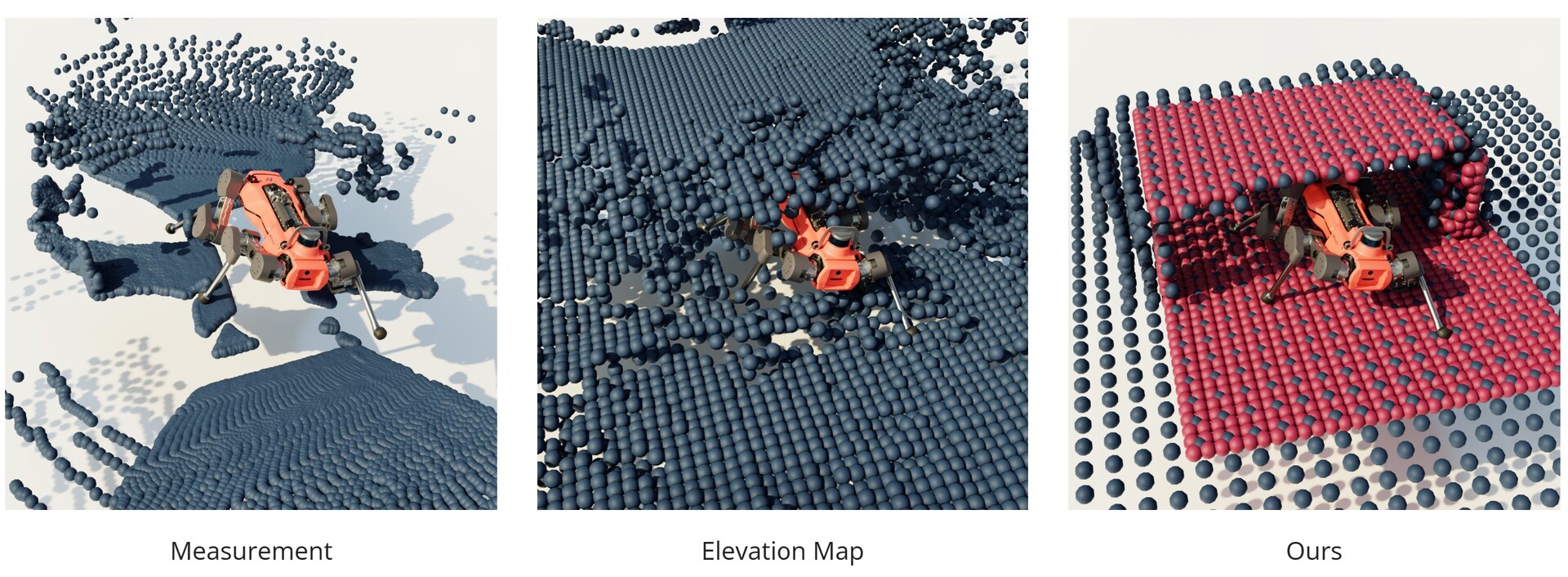
Il modulo di visione vede il mondo utilizzando sei telecamere di profondità Intel Realsense telecamere di profondità e un Velodyne LiDAR alimentato da un controller Nvidia Jetson Orin controller. Dal momento che la scansione laser e a infrarossi restituisce solo la posizione di singoli punti, i robot si trovano di fronte a blocchi nella navigazione sotto gli ostacoli o verso posizioni più elevate, a causa delle informazioni mancanti. I ricercatori dell'ETH risolvono questo problema ricostruendo il mondo in 3D dalle scansioni.
Il modulo di movimento contiene cinque azioni: scendere, salire, accovacciarsi, saltare e camminare. Ognuna è stata addestrata con sfide sempre più difficili. Ad esempio, il robot virtuale è stato addestrato ad accovacciarsi sotto tavoli sempre più bassi mentre si muoveva in avanti, o a saltare da una piattaforma all'altra mentre lo spazio aumentava.
Il modulo di navigazione prende ciò che il modulo di visione vede e impara a combinarlo con la direzione, la posizione e la tempistica che ogni abilità di movimento richiede per completare percorsi difficili e simulati. Il modulo è stato addestrato su 3000 percorsi di prova e ha imparato a navigare con oltre il 96% di successo.
ANYmal in azione
Una volta che tutti e tre i moduli sono stati addestrati nella simulazione, il cervello del software AI è stato installato in un robot ANYmal D da 55 kg, alimentato da due set di CPU Intel i7, 8GB di RAM e 240 GB di SSD. I video di ANYmal che completano corsi nella vita reale mostrano la sua abile capacità di superare rapidamente terreni difficili e ostacoli che fermerebbero altri robot.
I lettori interessati a sviluppare competenze nella robotica dovrebbero acquistare un kit(come questo su Amazon) e un libro per conoscere i robot(come questo su Amazon).
Fonte(i)

